Автоматика как наука получила наибольшее распространение с 50-х годов. Именно тогда автоматические устройства стали использоваться в промышленности, стали появляться и в быту, в городах появились автоматические двери, автоматы с газированной водой и прочие аппараты со своей встроенной системой управления.  Например мы, компания НПП "Сервомеханизмы", предлагаем подключить к системе управления нашу продукцию - винтовой домкрат, электроприводы и прямоходные механизмы различных типов. Они идеально подходят для подключения к системам управления. Примеры использования нашего оборудования, Вы можете посмотреть на нашем сайте www.servomh.ru. Например мы, компания НПП "Сервомеханизмы", предлагаем подключить к системе управления нашу продукцию - винтовой домкрат, электроприводы и прямоходные механизмы различных типов. Они идеально подходят для подключения к системам управления. Примеры использования нашего оборудования, Вы можете посмотреть на нашем сайте www.servomh.ru.
Автоматика очень близка робототехнике; робототехника, промышленные роботы (ПР)- это новый виток в развитии автоматических устройств. В настоящее время они используются на большинстве современных производств. Началось это внедрение еще во времена СССР, особенно активно шло развитие с начала 60-х годов. В 1966 в Воронеже был изобретен манипулятор для укладки металлических листов, в 1968 в Ленинграде году был изобретен подводный робот "Манта" с чувствительным захватным устройством, в дальнейшем он совершенствовался. В 1985 году уже использовалось 40 тыс промышленых роботов.
Сейчас речь уже идет о цехах - автоматах, даже целых заводах. В развитых промышленных городах США, России, Европы количество автоматизированых производств постоянно растет. Например один из видов такого робота - манипулятор или механическое устройство, воспроизводящие движения человеческой руки.
Кстати, мало кто знает, что термин "робот" придумал чешский писатель К. Чапек в своей социально-фантастической пьесе "Россумские универсальные роботы", опубликованной в 1920 году. Так он назвал механических рабочих, заменяющих людей на тяжелых работах. Образовано оно от чешского "rob" - раб и "robota" - тяжелый подневольный труд.
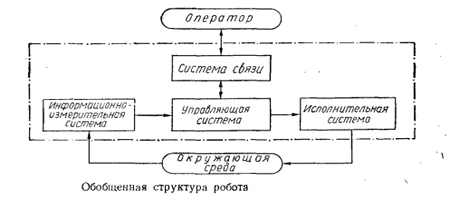
Общая структура робота представленна на схеме.
В зависимости от типа решаемых задач они делятся на два больших вида - производственные и исследовательские (например они занимаются поиском полезных ископаемых, исследовать грунт и т.п.)
В нашей стране роботостроение даже регулируется ГОСТом № 25686-85. Основные части промышленного робота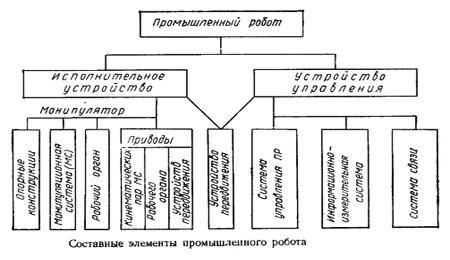
Манипулятор - управляемое устройство, выполняющие двигательные функции, оснащен рабочим органом.
Рабочий орган - составная часть исполнительного устройства для непосредственного выполнения технологических операций.
Устройство управления - для формирования и выдачи управленческих воздействий, в соответствии с заданной программой.
Исполнительное устройство ПР содержит один или несколько механических манипуляторов и устройство передвижения. Обычный манитулятор состоит из опорных конструкций, манипуляционной системы, рабочих органов, приводов кинематических пар с поступательными или вращательными перемещениями манипуляционной системы приводов устройств передвижения и рабочих органов.
Опорные конструкции необходимы для размещения устройств и агрегатов конструкции робота.
Манипуляционная система используется для переноса и рабочего органа или манипуляционного объекта в заданную точку. То есть для ориентации рабочего органа в простанстве, согласно установленной программы.
Приводы кинематических пар этой системы, например линейный привод, предназначены для изменения подводимой энергии в механической движение.
Устройство передвижения состоит из системы управления, информационно-измерительной системы с устройствами обратной связи.
Система управления - непосредственно формирует и выдает управляющие сигналы в ее состав входит пульт управления, запоминающее и вычислительные устройства, блоки управления и т.п.
Информационно-измерительная система и система связи (обмена информацией) входит в состав устройтсва управления.
Промышленные роботы принято классифицировать по нескольким признакам.
По грузоподъемности - сверхлегкие (до 1 кг.), легкие, средние, тяжелые, сверхтяжелые (более 1000 кг.).
По числу степеней подвижности, по способу монтажа на рабочем месте, по виду системы координат (декартова, цилиндрическая, сферическая, угловая и др.), по виду привода (электрический, пневматический, гидравлический), по виду системы управления (программное и адаптивное управление).
|


